Navigating with Keepout Zones¶
Overview¶
This tutorial shows how to simply utilize keep-out/safety zones where robots can’t enter and preferred lanes for robots moving in industrial environments and warehouses. All this functionality is being covered by KeepoutFilter costmap filter plugin which will be enabled and used in this document.
Requirements¶
It is assumed that ROS 2, Gazebo and TurtleBot3 packages are installed or built locally. Please make sure that Nav2 project is also built locally as it was made in Build and Install.
Tutorial Steps¶
1. Prepare filter mask¶
As was written in Navigation Concepts, any Costmap Filter (including Keepout Filter) are reading the data marked in a filter mask file. Filter mask - is the usual Nav2 2D-map distributed through PGM, PNG or BMP raster file with its metadata containing in a YAML file. The following steps help to understand how to make a new filter mask:
Create a new image with a PGM/PNG/BMP format: copy turtlebot3_world.pgm main map which will be used in a world simulation from a Nav2 repository to a new keepout_mask.pgm file.
Open keepout_mask.pgm in your favourite raster graphics editor (as an example could be taken GIMP editor). The lightness of each pixel on the mask means an encoded information for the specific costmap filter you are going to use. Color lightness of each pixel belongs to the [0..255] range (or [0..100] in percent scale), where 0 means black color and 255 - white. Another term “darkness” will be understood as the exact opposite of lightness. In other words color_darkness = 100% - color_lightness.
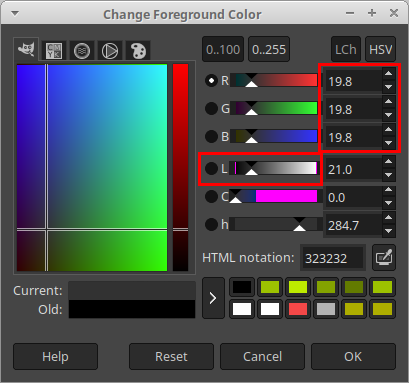
In the GIMP lightness is expressed through color components value (e.g. R in percent scale) and might be set by moving L slider in color changing tool:
The incoming mask file is being read by the Map Server and converted into OccupancyGrid values from [0..100] range (where 0 means free cell, 100 - occupied, anything in between - less or more occupied cells on map) or be equal to -1 for unknown value. In Nav2 stack each map has mode attribute which could be trinary, scale or raw. Depending on mode selected, the color lightness of PGM/PNG/BMP is being converted to OccupancyGrid by one of the following principles:
trinary(default mode): Darkness >=occupied_threshmeans that map occupied (100). Darkness <=free_thresh- map free (0). Anything in between - unknown status on map (-1).scale: Alpha <1.0- unknown. Darkness >=occupied_threshmeans that map occupied (100). Darkness <=free_thresh- map free (0). Anything in between - linearly interpolate to nearest integer from[0..100]range.raw: Lightness =0(dark color) means that map is free (0). Lightness =100(in absolute value) - map is occupied (100). Anything in between -OccupancyGridvalue = lightness. Lightness >=101- unknown (-1).
where free_thresh and occupied_thresh thresholds are expressed in percentage of maximum lightness/darkness level (255). Map mode and thresholds are placed in YAML metadata file (see below) as mode, free_thresh and occupied_thresh fields.
Note
There is another parameter in a YAML metadata file called negate. By default it is set to false. When it is set to true, blacker pixels will be considered as free, whiter pixels - as occupied. In this case we should count color lightness instead of darkness for trinary and scale modes. negate has no effect on raw mode.
For Keepout Filter OccupancyGrid value is proportional to the passibility of area corresponting to this cell: higher values means more impassable areas. Cells with occupied values covers keep-out zones where robot will never enter or pass through. KeepoutFilter can also act as a “weighted areas layer” by setting the OccupancyGrid to something between [1-99] non-occupied values. Robot is allowed to move in these areas, however its presence there would be “undesirable” there (the higher the value, the sooner planners will try to get the robot out of this area).
Keepout Filter also covers preferred lanes case, where robots should moving only on pre-defined lanes and permitted areas e.g. in warehouses. To use this feaure you need to prepare the mask image where the lanes and permitted areas will be marked with free values while all other areas will be occupied. TIP for drawing the mask in a trinary or scale mode: typically, amount of pixels belonging to lanes are much less than pixels covering other areas. In this case initially all lanes data might be drawn with a black pencil over white background and then (just before saving a PGM) “color inversion” tool in a image raster editor might be used.
For simplicity, in the example fill the areas with black color (in trinary mode this means occupied map) that you are going to mark as a keep-out zones:

After all keepout areas will be filled save the keepout_mask.pgm image.
Like all other maps, filter mask should have its own YAML metadata file. Copy turtlebot3_world.yaml to keepout_mask.yaml. Open keepout_mask.yaml and correct image field to a newly made PGM mask:
image: turtlebot3_world.pgm
->
image: keepout_mask.pgm
Since filter mask image was created as a copy of main map, other fields of YAML-file do not need to be changed. Save keepout_mask.yaml and new filter mask is ready to use.
Note
World map itself and filter mask could have different sizes, origin and resolution which might be useful e.g. for cases when filter mask is covering smaller areas on maps or when one filter mask is used repeatedly many times (like annotating a keepout zone for same shape rooms in the hotel). For this case, you need to correct resolution and origin fields in YAML as well so that the filter mask is correctly laid on top of the original map.
Note
Another important note is that since Costmap2D does not support orientation, the last third “yaw” component of the origin vector should be equal to zero. For example: origin: [1.25, -5.18, 0.0].
2. Configure Costmap Filter Info Publisher Server¶
Each costmap filter reads incoming meta-information (such as filter type or data conversion coefficients) in a messages of nav2_msgs/CostmapFilterInfo type. These messages are being published by Costmap Filter Info Publisher Server. The server is running as a lifecycle node. According to the design document, nav2_msgs/CostmapFilterInfo messages are going in a pair with OccupancyGrid filter mask topic. Therefore, along with Costmap Filter Info Publisher Server there should be enabled a new instance of Map Server configured to publish filter mask.
In order to enable Keepout Filter in your configuration, both servers should be enabled as a lifecycle nodes in Python launch-file. It is also possible to add them as Composition Nodes to your Navigation Component Container, which might look as follows:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument, GroupAction
from launch.conditions import IfCondition
from launch.substitutions import LaunchConfiguration, PythonExpression
from launch.substitutions import NotEqualsSubstitution
from launch_ros.actions import Node, LoadComposableNodes
from launch_ros.actions import PushRosNamespace
from launch_ros.descriptions import ComposableNode
from nav2_common.launch import RewrittenYaml
def generate_launch_description():
# Get the launch directory
costmap_filters_demo_dir = get_package_share_directory('nav2_costmap_filters_demo')
lifecycle_nodes = ['filter_mask_server', 'costmap_filter_info_server']
# Parameters
namespace = LaunchConfiguration('namespace')
use_sim_time = LaunchConfiguration('use_sim_time')
autostart = LaunchConfiguration('autostart')
params_file = LaunchConfiguration('params_file')
mask_yaml_file = LaunchConfiguration('mask')
use_composition = LaunchConfiguration('use_composition')
container_name = LaunchConfiguration('container_name')
container_name_full = (namespace, '/', container_name)
# Declare the launch arguments
declare_namespace_cmd = DeclareLaunchArgument(
'namespace',
default_value='',
description='Top-level namespace')
declare_use_sim_time_cmd = DeclareLaunchArgument(
'use_sim_time',
default_value='true',
description='Use simulation (Gazebo) clock if true')
declare_autostart_cmd = DeclareLaunchArgument(
'autostart', default_value='true',
description='Automatically startup the nav2 stack')
declare_params_file_cmd = DeclareLaunchArgument(
'params_file',
description='Full path to the ROS2 parameters file to use')
declare_mask_yaml_file_cmd = DeclareLaunchArgument(
'mask',
description='Full path to filter mask yaml file to load')
declare_use_composition_cmd = DeclareLaunchArgument(
'use_composition', default_value='True',
description='Use composed bringup if True')
declare_container_name_cmd = DeclareLaunchArgument(
'container_name', default_value='nav2_container',
description='The name of container that nodes will load in if use composition')
# Make re-written yaml
param_substitutions = {
'use_sim_time': use_sim_time,
'yaml_filename': mask_yaml_file}
configured_params = RewrittenYaml(
source_file=params_file,
root_key=namespace,
param_rewrites=param_substitutions,
convert_types=True)
load_nodes = GroupAction(
condition=IfCondition(PythonExpression(['not ', use_composition])),
actions=[
Node(
package='nav2_map_server',
executable='map_server',
name='filter_mask_server',
namespace=namespace,
output='screen',
emulate_tty=True, # https://github.com/ros2/launch/issues/188
parameters=[configured_params]),
Node(
package='nav2_map_server',
executable='costmap_filter_info_server',
name='costmap_filter_info_server',
namespace=namespace,
output='screen',
emulate_tty=True, # https://github.com/ros2/launch/issues/188
parameters=[configured_params]),
Node(
package='nav2_lifecycle_manager',
executable='lifecycle_manager',
name='lifecycle_manager_costmap_filters',
namespace=namespace,
output='screen',
emulate_tty=True, # https://github.com/ros2/launch/issues/188
parameters=[{'use_sim_time': use_sim_time},
{'autostart': autostart},
{'node_names': lifecycle_nodes}])
]
)
load_composable_nodes = GroupAction(
condition=IfCondition(use_composition),
actions=[
PushRosNamespace(
condition=IfCondition(NotEqualsSubstitution(LaunchConfiguration('namespace'), '')),
namespace=namespace),
LoadComposableNodes(
target_container=container_name_full,
composable_node_descriptions=[
ComposableNode(
package='nav2_map_server',
plugin='nav2_map_server::MapServer',
name='filter_mask_server',
parameters=[configured_params]),
ComposableNode(
package='nav2_map_server',
plugin='nav2_map_server::CostmapFilterInfoServer',
name='costmap_filter_info_server',
parameters=[configured_params]),
ComposableNode(
package='nav2_lifecycle_manager',
plugin='nav2_lifecycle_manager::LifecycleManager',
name='lifecycle_manager_costmap_filters',
parameters=[{'use_sim_time': use_sim_time},
{'autostart': autostart},
{'node_names': lifecycle_nodes}]),
]
)
]
)
ld = LaunchDescription()
ld.add_action(declare_namespace_cmd)
ld.add_action(declare_use_sim_time_cmd)
ld.add_action(declare_autostart_cmd)
ld.add_action(declare_params_file_cmd)
ld.add_action(declare_mask_yaml_file_cmd)
ld.add_action(declare_use_composition_cmd)
ld.add_action(declare_container_name_cmd)
ld.add_action(load_nodes)
ld.add_action(load_composable_nodes)
return ld
where the params_file variable should be set to a YAML-file having ROS parameters for Costmap Filter Info Publisher Server and Map Server nodes. These parameters and their meaning are listed at Map Server / Saver page. Please, refer to it for more information. The example of params_file could be found below:
costmap_filter_info_server:
ros__parameters:
use_sim_time: true
type: 0
filter_info_topic: "/costmap_filter_info"
mask_topic: "/keepout_filter_mask"
base: 0.0
multiplier: 1.0
filter_mask_server:
ros__parameters:
use_sim_time: true
frame_id: "map"
topic_name: "/keepout_filter_mask"
yaml_filename: "keepout_mask.yaml"
Note, that:
For Keepout Filter the
typeof costmap filter should be set to0.Filter mask topic name should be the equal for
mask_topicparameter of Costmap Filter Info Publisher Server andtopic_nameparameter of Map Server.According to the Costmap Filters design,
OccupancyGridvalues are being linearly transformed into feature map in a filter space. For a Keepout Filter these values are directly passed as a filter space values without a linear conversion. Even thoughbaseandmultipliercoefficients are not used in Keepout Filter, they should be set to0.0and1.0accordingly in order to explicitly show that we have one-to-one conversion fromOccupancyGridvalues -> to a filter value space.
Ready-to-go standalone Python launch-script, YAML-file with ROS parameters and filter mask example for Keepout Filter could be found in a nav2_costmap_filters_demo directory of navigation2_tutorials repository. To simply run Filter Info Publisher Server and Map Server tuned on Turtlebot3 standard simulation written at Getting Started, build the demo and launch costmap_filter_info.launch.py as follows:
$ mkdir -p ~/tutorials_ws/src
$ cd ~/tutorials_ws/src
$ git clone https://github.com/ros-planning/navigation2_tutorials.git
$ cd ~/tutorials_ws
$ colcon build --symlink-install --packages-select nav2_costmap_filters_demo
$ source ~/tutorials_ws/install/setup.bash
$ ros2 launch nav2_costmap_filters_demo costmap_filter_info.launch.py params_file:=`pwd`/src/navigation2_tutorials/nav2_costmap_filters_demo/params/keepout_params.yaml mask:=`pwd`/src/navigation2_tutorials/nav2_costmap_filters_demo/maps/keepout_mask.yaml use_composition:=True
3. Enable Keepout Filter¶
Costmap Filters are Costamp2D plugins. You can enable the KeepoutFilter plugin in Costmap2D by adding keepout_filter to the plugins parameter in nav2_params.yaml. You can place it in the global_costmap for planning with keepouts and local_costmap to make sure the robot won’t attempt to drive through a keepout zone. The KeepoutFilter plugin should have the following parameters defined:
plugin: type of plugin. In our casenav2_costmap_2d::KeepoutFilter.filter_info_topic: filter info topic name. This need to be equal tofilter_info_topicparameter of Costmap Filter Info Publisher Server from the chapter above.
Full list of parameters supported by KeepoutFilter are listed at Keepout Filter Parameters page.
It is important to note that enabling KeepoutFilter for global_costmap only will cause the path planner to build plans bypassing keepout zones. Enabling KeepoutFilter for local_costmap only will cause the robot to not enter keepout zones, but the path may still go through them. So, the best practice is to enable KeepoutFilter for global and local costmaps simultaneously by adding it both in global_costmap and local_costmap in nav2_params.yaml. However it does not always have to be true. In some cases keepout zones don’t have to be the same for global and local costmaps, e.g. if the robot doesn’t allowed to intentionally go inside keepout zones, but if its there, the robot can drive in and out really quick if it clips an edge or corner. For this case, there is not need to use extra resources of the local costmap copy.
To enable KeepoutFilter with same mask for both global and local costmaps, use the following configuration:
global_costmap:
global_costmap:
ros__parameters:
...
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
filters: ["keepout_filter"]
...
keepout_filter:
plugin: "nav2_costmap_2d::KeepoutFilter"
enabled: True
filter_info_topic: "/costmap_filter_info"
...
local_costmap:
local_costmap:
ros__parameters:
...
plugins: ["voxel_layer", "inflation_layer"]
filters: ["keepout_filter"]
...
keepout_filter:
plugin: "nav2_costmap_2d::KeepoutFilter"
enabled: True
filter_info_topic: "/costmap_filter_info"
Note
All costmap filters should be enabled through a filters parameter – though it is technically possible to include in the layered costmap itself. This is separated from the layer plugins to prevent interference in the layers, particularly the inflation layer.
4. Run Nav2 stack¶
After Costmap Filter Info Publisher Server and Map Server were launched and Keepout Filter was enabled for global/local costmaps, run Nav2 stack as written in Getting Started:
ros2 launch nav2_bringup tb3_simulation_launch.py
And check that filter is working properly as in the pictures below (first picture shows keepout filter enabled for the global costmap, second - differently-sized keepout_mask.pgm filter mask):